Course objective: design and build a complete mechatronics system around the MSP430 microcontroller in one month, start to finish.
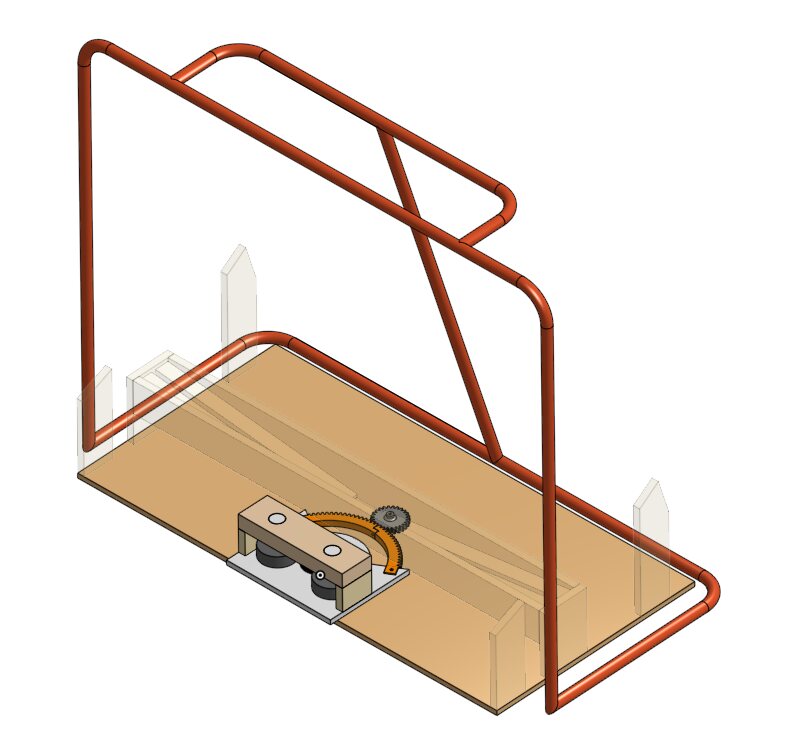
- Integrate with a standard hockey net to collect shot pucks automatically using a custom ramp structure.
- Return pucks to the shooter using image recognition allowing a player to maximize solo training time.